
What is Dual-Light Mode Flight? Comprehensive Detection of Thermal Defects
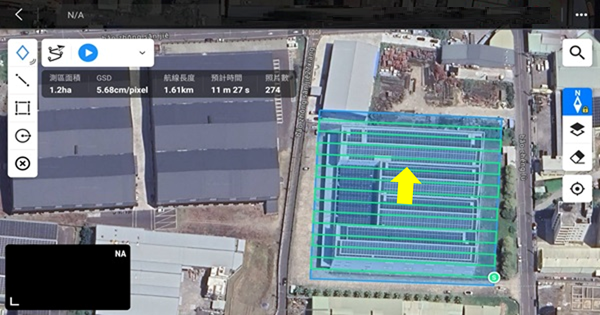
The so-called “Dual-Sensor Mode” UAV inspection refers to an inspection method that simultaneously uses visible light (RGB) and thermal infrared (Thermal) sensors to capture images at the same time. This approach closely aligns with the recommended inspection conditions of IEC 62446-3. The recommended equipment includes the DJI M3T and DJI M4T. During inspection, the UAV should maintain an approximate distance of 30 m from the PV modules (with a GSD of about 3–4 cm/px) and a flight speed of around 3 m/s. Flight path planning should follow the core principle that the flight direction remains parallel to the module arrangement. The yellow arrow in the figure indicates the aircraft heading, which must remain consistent throughout the automatic flight route to avoid variations in viewing angles that could increase the difficulty of AI analysis and expert interpretation. Appropriate image overlap rates should be set according to site conditions. For ground-mounted or floating PV systems, a 70% forward and side overlap is recommended, while rooftop systems, due to their higher environmental complexity, are recommended to use 80% overlap in both directions. The camera tilt angle and flight altitude should also be adjusted according to the module tilt angle to ensure that each row of modules is scanned completely with stable resolution. When planning the flight path, at least one outer buffer flight line should be reserved outside the inspection area to prevent missed coverage caused by GPS positioning errors. The flight speed should not exceed 3 m/s to ensure thermal image clarity and geometric stability. With these standardized settings, it is possible to obtain measurable and traceable dual-sensor image data, ensuring the accuracy and completeness of subsequent AI defect analysis and defect localization.