
什麼是雙光模式飛行?全面查找熱缺陷
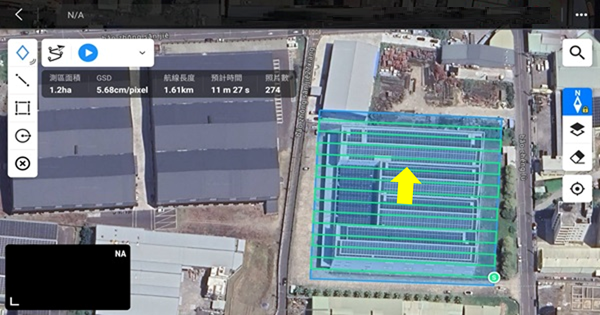
所謂「雙光模式」無人機巡檢,是指同時使用可見光(RGB)與紅外線熱影像(Thermal)兩種感測器進行同步拍攝的檢測方式,接近 IEC 62446-3 檢測條件。建議設備為 DJI M3T 與 DJI M4T,檢測時無人機離模組距離約30m ( GSD 介於3~4 cm/px),移動速度為 3m/s,航線規劃以「航線與模組排列方向平行」為核心原則,圖中黃色箭頭代表機頭方向,在自動航線範圍內必須始終保持同一朝向,以避免不同視角造成AI與專家判讀難度;同時需依場域型態設定適當重疊率(地面/水上型建議航向與旁向各70%,屋頂型因環境複雜度較高建議各80%),並根據模組傾角調整鏡頭俯角與飛行高度,以確保每一排模組都能以穩定解析度被完整掃描。規劃路徑時應在巡檢區域外至少保留一條外圍航線,避免因GPS誤差造成漏拍;飛行速度建議不超過3 m/s,以確保熱影像清晰度與幾何穩定性。透過上述標準化設定,可有效取得可量測、可回溯的雙光影像資料,確保後續AI缺陷分析、定位的精準度與完整性。